ЦұҪЗЧшҳЛҷCЖчИЛёЕДоЈә
№ӨҳI(yЁЁ)‘Ә(yЁ©ng)УГЦРЈ¬ДЬүт?qЁұ)Қ¬F(xiЁӨn)ЧФ„УҝШЦЖөДЎўҝЙЦШҸН(fЁҙ)ҫҺіМөДЎў¶а№ҰДЬөДЎў¶аЧФУЙ¶ИөДЎўЯ\„УЧФУЙ¶ИҪЁіЙҝХйgЦұҪЗкP(guЁЎn)ПөЎў¶аУГНҫөДІЩЧчҷCЎЈЛыДЬүт°бЯ\ОпуwЎўІЩЧч№ӨҫЯЈ¬ТФНкіЙёч·NЧчҳI(yЁЁ)ЎЈкP(guЁЎn)УЪҷCЖчИЛөД¶ЁБxлSЦшҝЖјјөДІ»”а°l(fЁЎ)Х№Ј¬ФЪІ»”аөДНкЙЖЈ¬ЦұҪЗЧшҳЛҷCЖчИЛЧчһйҷCЖчИЛөДТ»·NЈ¬Ждә¬БxТІФЪІ»”аөДНкЙЖЦРЎЈ
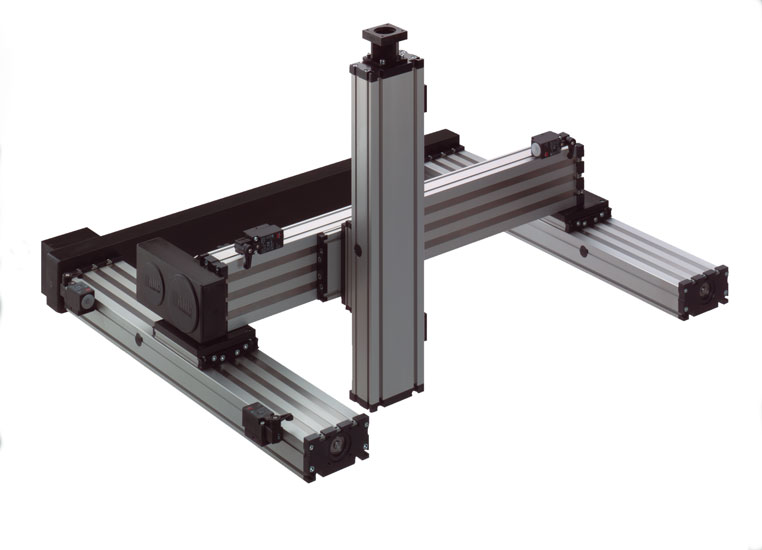
өдРНЦұҪЗЧшҳЛҷCЖчИЛҲDТ»
ЦұҪЗЧшҳЛҷCЖчИЛөДМШьcЈә
1ЎўЧФУЙ¶ИЯ\„УЈ¬ГҝӮҖЯ\„УЧФУЙ¶ИЦ®йgөДҝХйgҠAҪЗһйЦұҪЗЈ»
2ЎўЧФ„УҝШЦЖөДЈ¬ҝЙЦШҸН(fЁҙ)ҫҺіМЈ¬ЛщУРөДЯ\„Уҫщ°ҙіМРтЯ\РРЈ»
3ЎўТ»°гУЙҝШЦЖПөҪy(tЁҜng)ЎўтҢ(qЁұ)„УПөҪy(tЁҜng)ЎўҷCРөПөҪy(tЁҜng)ЎўІЩЧч№ӨҫЯөИҪMіЙЎЈ
4Ўўм`»оЈ¬¶а№ҰДЬЈ¬ТтІЩЧч№ӨҫЯөДІ»Н¬№ҰДЬТІІ»Н¬ЎЈ
5ЎўёЯҝЙҝҝРФЎўёЯЛЩ¶ИЎўёЯҫ«¶ИЎЈ
6ЎўҝЙУГУЪҗәБУөДӯh(huЁўn)ҫіЈ¬ҝЙйLЖЪ№ӨЧчЈ¬ұгУЪІЩЧчҫSРЮЎЈ
ЦұҪЗЧшҳЛҷCЖчИЛөД‘Ә(yЁ©ng)УГЈә
ТтД©¶ЛІЩЧч№ӨҫЯөДІ»Н¬Ј¬ЦұҪЗЧшҳЛҷCЖчИЛҝЙТФ·ЗіЈ·ҪұгөДУГЧчёч·NЧФ„У»ҜФO(shЁЁ)ӮдЈ¬НкіЙИзәёҪУЎў°бЯ\ЎўЙППВБПЎў°ьСbЎўҙa¶вЎўІр¶вЎўҷzңyЎўМҪӮыЎў·ЦоҗЎўСbЕдЎўЩNҳЛЎўҮҠҙaЎўҙтҙaЎўЈЁЬӣ·ВРНЈ©ҮҠНҝЎўДҝҳЛёълSЎўЕЕұ¬өИТ»ПөБР№ӨЧчЎЈМШ„eЯmУГУЪ¶аЖ··NЎўұгЕъБҝөДИбРФ»ҜЧчҳI(yЁЁ)Ј¬ҢҰУЪ·Җ(wЁ§n)¶ЁМбёЯ®a(chЁЈn)Ж·Щ|(zhЁ¬)БҝЈ¬МбёЯ„Ъ„УЙъ®a(chЁЈn)ВКЈ¬ёДЙЖ„Ъ„У—lјюәН®a(chЁЈn)Ж·өДҝмЛЩёьРВ?liЁўn)QҙъЖрЦшК®·ЦЦШТӘөДЧчУГЎЈ
ЦұҪЗЧшҳЛҷCЖчИЛөД‘Ә(yЁ©ng)УГҲD¶ю
лSЦшЦұҪЗЧшҳЛҷCЖчИЛөД‘Ә(yЁ©ng)УГФҪҒнФҪҸV·әЈ¬ЦұҪЗЧшҳЛҷCЖчИЛөДФO(shЁЁ)УӢ№ӨЧчИХТжп@өГЦШТӘЎЈіЙ№ҰөДФO(shЁЁ)УӢТ»Е_ЦұҪЗЧшҳЛҷCЖчИЛЙжј°өҪәЬ¶а·ҪГжөД№ӨЧчЈ¬°ьАЁҷCРөҪY(jiЁҰ)ҳӢ(gЁ°u)Ўў„УБҰтҢ(qЁұ)„УЎўЛЕ·юҝШЦЖөИөИЎЈЙтк–БҰНШЧФ„У»ҜҝШЦЖјјРg(shЁҙ)УРПЮ№«ЛҫУРЦш¶аДкЦұҪЗЧшҳЛҷCЖчИЛјјРg(shЁҙ)‘Ә(yЁ©ng)УГЎў”ө(shЁҙ)ҝШјјРg(shЁҙ)әН®a(chЁЈn)Ж·СР°l(fЁЎ)Ҫӣ(jЁ©ng)тһЈ¬ОТӮғТАНРөВҮшBAHR№«ЛҫЦұҫҖ¶ЁО»ПөҪy(tЁҜng)РФј°ҷCРөКЦұЫй_°l(fЁЎ)іцБЛғrұИғһ(yЁӯu)БјөДПөБР”ө(shЁҙ)ҝШЦұҪЗЧшҳЛҷCЖчИЛЈ¬ұ»ҸV·әөШ‘Ә(yЁ©ng)УГФЪЖыЬҮЎўлҠЧУЎўлҠЖчЎўҷzңyЎўбt(yЁ©)ҜҹЎўәҪМмЎўКіЖ·өИёчӮҖоI(lЁ«ng)УтөДЙъ®a(chЁЈn)ҫҖЙПЎЈ
ПВГжОТӮғҫНҢҰЦұҪЗЧшҳЛҷCЖчИЛөДФO(shЁЁ)УӢЯMРРТ»ӮҖәҶТӘөДкUКцЎЈ
Т»ЎўҷCЖчИЛФO(shЁЁ)УӢМШьcЈә
1ЎўҷCЖчИЛөДФO(shЁЁ)УӢКЗТ»ӮҖҸН(fЁҙ)лsөД№ӨЧчЈ¬№ӨЧчБҝәЬҙуЈ¬Йжј°өДЦӘЧRГжәЬ¶аЈ¬НщНщРиТӘ¶аИЛНкіЙЎЈ
2ЎўҷCЖчИЛФO(shЁЁ)УӢКЗГжПтҝН‘фөДФO(shЁЁ)УӢЈ¬І»КЗй]йTФмЬҮЎЈФO(shЁЁ)УӢХЯРиТӘҪӣ(jЁ©ng)іЈәНУГ‘фФЪТ»ЖрЈ¬І»НЈ·ЦОцУГ‘фТӘЗуЈ¬ҢӨЗуҪвӣQ·Ҫ°ёЎЈ
3ЎўҷCЖчИЛФO(shЁЁ)УӢКЗГжПтјУ№ӨөДФO(shЁЁ)УӢЈ¬ФЩәГөДФO(shЁЁ)УӢЈ¬Из№ы№ӨҸSІ»ДЬјУ№Өіц®a(chЁЈn)Ж·Ј¬ФO(shЁЁ)УӢТІКЗК§”ЎөДЈ¬ФO(shЁЁ)УӢХЯРиТӘХЖОХҙуБҝөДјУ№Ө№ӨЛҮј°јУ№ӨКЦ¶ОЎЈ
4ЎўҷCЖчИЛФO(shЁЁ)УӢКЗТ»ӮҖІ»”аНкЙЖөДЯ^іМЎЈ
¶юЎўҷCЖчИЛФO(shЁЁ)УӢБчіМЈә
1ЎўК№УГТӘЗуөД·ЦОцЈәГҝТ»ӮҖҷCЖчИЛ¶јКЗёщ“ю(jЁҙ)МШ¶ЁөДТӘЗуөД®a(chЁЈn)Йъ¶шФO(shЁЁ)УӢөДЈ¬ФO(shЁЁ)УӢөДөЪТ»ІҪҫНКЗТӘҢўК№УГТӘЗу·ЦОцЗеіюЈ¬ҙ_¶ЁФO(shЁЁ)УӢ•rРиТӘҝј‘]өД…ў”ө(shЁҙ)Ј¬°ьАЁЈә
ҷCЖчИЛөД¶ЁО»ҫ«¶ИЈ¬ЦШҸН(fЁҙ)¶ЁО»ҫ«¶ИЈ»
ҷCЖчИЛөДШ“ЭdҙуРЎЈ¬Ш“ЭdМШРФЈ»
ҷCЖчИЛЯ\„УөДЧФУЙ¶И”ө(shЁҙ)БҝЈ¬ГҝЧФУЙ¶ИөДЯ\„УРРіМЈ»
ҷCЖчИЛөД№ӨЧчЦЬЖЪ»тЯ\„УЛЩ¶ИЈ¬јУңpЛЩМШРФЈ»
ҷCЖчИЛөДЯ\„УЬүЫEЈ¬„УЧчөДкP(guЁЎn)В“(liЁўn)Ј»
ҷCЖчИЛөД№ӨЧчӯh(huЁўn)ҫіЎў°ІСb·ҪКҪЈ»
ҷCЖчИЛөДЯ\РР№ӨЧчЦЖЎўЯ\РРүЫГьЈ»
ЖдЛыМШКвТӘЗуЈ»
2Ўў ұҫҷCРөДЈРНіхҪЁЈәҷCЖчИЛҸДҷCРөҪY(jiЁҰ)ҳӢ(gЁ°u)·ЦҙууwҝЙ·ЦһйэҲйTҪY(jiЁҰ)ҳӢ(gЁ°u)ЎўұЪ’мҪY(jiЁҰ)ҳӢ(gЁ°u)Ј¬ҙ№’мҪY(jiЁҰ)ҳӢ(gЁ°u)Ј¬ёщ“ю(jЁҙ)°ІСbҝХ
йgөДТӘЗуЯx“сІ»Н¬өДҪY(jiЁҰ)ҳӢ(gЁ°u)Ј¬Гҝ·NҪY(jiЁҰ)ҳӢ(gЁ°u)өДБҰҢWМШРФЎўЯ\„УМШРФ¶јКЗІ»Т»ҳУөДЎЈәуАm(xЁҙ)өДФO(shЁЁ)УӢұШнҡКЗ»щУЪТ»ӮҖҙ_¶ЁөДҪY(jiЁҰ)ҳӢ(gЁ°u)ЎЈ
ҷCЖчИЛөД»щұҫҪY(jiЁҰ)ҳӢ(gЁ°u)ҲDИэ
3ЎўЯ\„УРФДЬУӢЛгЈәУРкP(guЁЎn)Ф“РФДЬөД…ў”ө(shЁҙ)УРЈә
ЖҪҫщЛЩ¶ИЈәV=S/t ЛЩ¶ИЗъҫҖЛД
ЧоҙуЛЩ¶ИЈәVmax=at
јУЛЩ¶И/ңpЛЩ¶ИЈәa=F/m
ЖдЦРЈәSһйЯ\„УРРіМ
tһй¶ЁО»Я\„У•rйg
FјУЛЩ•rөДтҢ(qЁұ)„УБҰ
MЯ\„УОпуwЩ|(zhЁ¬)БҝәН
4ЎўБҰҢWМШРФ·ЦОц
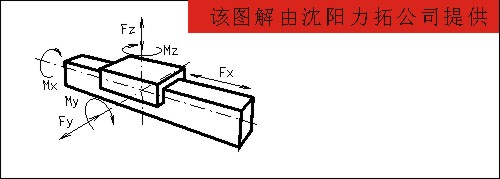
Т»ӮҖҷCЖчИЛКЗУЙФS¶а¶ЁО»ҶОФӘҪMіЙөДЈ¬Гҝёщ¶ЁО»ПөҪy(tЁҜng)¶јТӘ·ЦОцЎЈРиТӘ·ЦОцөДн—ДҝИзПВЈә
Л®ЖҪНЖБҰFx БҰҢW·ЦОцҲDОе
ХэүәБҰFz
ӮИ(cЁЁ)үәБҰFy
MxЎўMyЎўMz
5ЎўҷCРөҸҠ¶ИРЈәЛЈә
ГҝӮҖ¶ЁО»ҶОФӘЈ¬ГҝӮҖБә¶јТӘЯMРРРЈәЛЈ¬УИЖдлp¶ЛЦ§“ОБәәН‘ТұЫБәЎЈ
1Ј© “П¶ИЧғРОУӢЛг
“П¶ИЧғРОҲDБщ
FЈәШ“ЭdЈЁNЈ©Ј»
LЈә¶ЁО»ҶОФӘйL¶ИЈЁmmЈ©Ј»
EЈәІДБПҸ—РФДЈБҝЈ»
IЈәІДБПҪШГж‘TРФҫШ(mm4)Ј»
fЈә“П¶ИРОЧғЈЁmmЈ©
ЧўТвЈәФЪУӢЛг“П¶ИРОЧғ•rЈ¬БәөДЧФЦШ®a(chЁЈn)ЙъөДЧғРОІ»ДЬәцТ•Ј¬БәөДЧФЦШ°ҙҫщІјЭdәЙУӢЛгЎЈ
ТФЙП№«КҪУӢЛгөДКЗмo‘B(tЁӨi)РОЧғЈ¬ҢҚлH‘Ә(yЁ©ng)УГЦРЈ¬ТтһйҷCЖчИЛТ»ЦұМҺУЪЯ\„У о‘B(tЁӨi)Ј¬ұШнҡУӢЛгјУЛЩБҰ®a(chЁЈn)ЙъөДРОЧғЈ¬РОЧғЦұҪУУ°н‘ҷCЖчИЛөДЯ\РРҫ«¶ИЎЈ
2Ј©ЕӨЮD(zhuЁЈn)РОЧғУӢЛгЈә
®”Т»ёщБәөДТ»¶Л№М¶ЁЈ¬БнТ»¶ЛК©јУТ»ӮҖА@ЭSЕӨҫШәуЈ¬Ңў®a(chЁЈn)ЙъЕӨЗъЧғРОЎЈҢҚлH‘Ә(yЁ©ng)УГЦР®a(chЁЈn)ЙъФ“РОЧғөДФӯТтТ»°гКЗШ“ЭdЖ«РД»тУРА@ЭSјУЛЩРэЮD(zhuЁЈn)өДОпуwҙжФЪЎЈ
ЕӨЮD(zhuЁЈn)БҰҫШ·ЦОцҲDЖЯЎў°Л
6ЎўтҢ(qЁұ)„УФӘјюЯx“с
іЈУГөДтҢ(qЁұ)„УПөҪy(tЁҜng)УРЈәҪ»Бч/Ц§БчЛЕ·юлҠҷCтҢ(qЁұ)„УПөҪy(tЁҜng)ЎўІҪЯMлҠҷCтҢ(qЁұ)„УПөҪy(tЁҜng)ЎўЦұҫҖЛЕ·юлҠҷC/ЦұҫҖІҪЯMлҠҷCтҢ(qЁұ)„УПөҪy(tЁҜng)ЎЈ
ГҝТ»ӮҖтҢ(qЁұ)„УПөҪy(tЁҜng)¶јУЙлҠҷCәНтҢ(qЁұ)„УЖчғЙІҝ·ЦҪMіЙЎЈтҢ(qЁұ)„УЖчөДЧчУГКЗҢўИхлҠРЕМ–·ЕҙуЈ¬ҢўЖдјУЭdФЪтҢ(qЁұ)„УлҠҷCөДҸҠлҠЙПЈ¬тҢ(qЁұ)„УлҠҷCЎЈлҠҷC„tКЗҢўлҠРЕМ–ЮD(zhuЁЈn)»ҜіЙҫ«ҙ_өДЛЩ¶Иј°ҪЗО»ТЖЎЈ
РиТӘУӢЛгөДн—ДҝИзПВЈә
лҠҷC№ҰВКЈә
лҠҷCЕӨҫШЈә
лҠҷCЮD(zhuЁЈn)ЛЩЈә
ңpЛЩҷCңpЛЩұИ
лҠҷC‘TБҝ/Ш“Эd‘TБҝөДЖҘЕдкP(guЁЎn)Пө
ЖдЛыУӢЛ㹫КҪј°УӢЛг·Ҫ·ЁХҲЕcЙтк–БҰНШ№«ЛҫВ“(liЁўn)ПөЎЈ
7ЎўҷCРөҪY(jiЁҰ)ҳӢ(gЁ°u)ФO(shЁЁ)УӢ
ФЪНкіЙБЛЗ°ГжБщн—№ӨЧчәуЈ¬Т»ӮҖЦұҪЗЧшҳЛҷCЖчИЛ¶ЁО»ПөҪy(tЁҜng)өДлrРОҫНТСҪӣ(jЁ©ng)ФЪФO(shЁЁ)УӢХЯөДо^ДXЦРРОіЙБЛЈ¬ҪУПВҒнөД№ӨЧчҫНКЗҢўлrРО®ӢіЙ№ӨіМҲDЈ¬ТФұгЙъ®a(chЁЈn)ЎЈОТӮғҪЁЧhУГ‘фУГИэҫSЬӣјюФO(shЁЁ)УӢЈ¬ТФұгҷzІйКЗ·сҙжФЪО»ЦГёЙЙжЎЈ
ҷCЖчИЛөДЯ\„УЬүЫEҫЯУРІ»ҙ_¶ЁРФЈ¬м`»о¶аЧғЈ¬НщНщФЪТ»ӮҖО»ЦГІ»ҙжФЪО»ЦГёЙЙжЈ¬ө«өҪПВТ»ӮҖО»ЦГҫНёЙЙжБЛЎЈ
8ЎўФO(shЁЁ)ӮдүЫГьРЈәЛ
ҷCРөҪY(jiЁҰ)ҳӢ(gЁ°u)ФO(shЁЁ)УӢНкіЙәуЈ¬ТӘҢҰХыЕ_ФO(shЁЁ)ӮдЯMРРүЫГьУӢЛгЈ¬әЛРДФӘјюөДүЫГьөҪТӘУӢЛгЈ¬ИзҷCЖчИЛЬүөАөДүЫГьЈ¬ңpЛЩҷCөДүЫГьЈ¬ЛЕ·юлҠҷCөДүЫГьөИЎЈ
ҷCЖчИЛөДЯ\РРүЫГьЕcЯ\РРЛЩ¶ИЎўШ“ЭdҙуРЎЎўҪY(jiЁҰ)ҳӢ(gЁ°u)РОКҪЎў№ӨЧчӯh(huЁўn)ҫіЎў№ӨЧчЦЖөИУРкP(guЁЎn)ЎЈ
Из№ы°l(fЁЎ)¬F(xiЁӨn)ҷCЖчИЛөДЯ\РРүЫГьМ«¶МЈ¬РиТӘЦШРВХ{(diЁӨo)ХыФO(shЁЁ)УӢЎЈ
ҫЯуwУӢЛг·Ҫ·ЁХҲЕcЙтк–БҰНШ№«ЛҫВ“(liЁўn)ПөЎЈ
9ЎўҝШЦЖПөҪy(tЁҜng)өДЯx“с
ӣ]УРҝШЦЖПөҪy(tЁҜng)өДҷCЖчИЛҫНПуИЛӣ]УРҙуДXТ»ҳУЈ¬І»ДЬҲМ(zhЁӘ)РРИОәО„УЧчЎЈЛщТФОТӮғНЁіЈҢўӣ]УРЕдӮдҝШЦЖПөҪy(tЁҜng)өДҷCРөҪY(jiЁҰ)ҳӢ(gЁ°u)·QһйВгҷC»тҷCЖчИЛ¶ЁО»ПөҪy(tЁҜng)ЈЁrobot positioning systemЈ©ЎЈ
ёщ“ю(jЁҙ)ТӘЗуөДІ»Н¬Ј¬ҝШЦЖПөҪy(tЁҜng)өДЯx“сТІІ»Н¬Ј¬НЁіЈЯx“сЧчһйҝШЦЖПөҪy(tЁҜng)өД®a(chЁЈn)Ж·УРЈә
PLC іМРтҝШЦЖЖчЈ»
№ӨҳI(yЁЁ)Я\„УҝШЦЖҝЁЈЁmotion cardЈ©;
”ө(shЁҙ)ЧЦҝШЦЖПөҪy(tЁҜng)(CNC)
ҢЈУЪҝШЦЖЖч
10ЎўіМРтҫҺҢ‘
ҝШЦЖПөҪy(tЁҜng)КЗҷCЖчИЛөДҙуДXЈ¬іМРтКЗҷCЖчИЛөДЛјПлЎЈіМРтөДҫҺҢ‘ЦұҪУ·ҙ‘Ә(yЁ©ng)ФO(shЁЁ)УӢХЯөДЛјПлЎўТвҲDәНЯ\„УРиЗуЎЈ
ҫҺҢ‘іМРтКЗТ»ӮҖҸН(fЁҙ)лsөДЯ^іМЈ¬ө«Ц»ТӘҷCЖчИЛҝӮуwФO(shЁЁ)УӢӣ]УРҶ–о}Ј¬іМРтҝӮ•юҫҺіцҒнөДЎЈҫҺіМРтТӘЧўТвТФПВҶ–о}Јә
ҢҰИО„Х(wЁҙ)өД·ЦОцТӘЗеОъЈ¬ҫҺіМҢУҙОТӘ·ЦГчЈ¬ЯүЭӢЗеОъЎЈ
ҪY(jiЁҰ)КшХZЈә
ҷCЖчИЛөДФO(shЁЁ)УӢКЗТ»ӮҖІ»”аКмПӨЈ¬І»”аНкЙЖөДЯ^іМЈ¬РиТӘІ»”аФЪҢҚлH‘Ә(yЁ©ng)УГЦРҝӮҪY(jiЁҰ)МбёЯЎЈғИ(nЁЁi)ИЭэӢлsЈ¬јҡ№қ(jiЁҰ)ұҠ¶аЎЈұҫОДЦ»КЗЧцБЛР©әҶҶОөДҪйҪBЈ¬УРЕdИӨЕуУСҝЙЕcОТӮғВ“(liЁўn)ПөЈЁlt.sy@126.comЈ©Ј¬ЛчИЎФ”јҡөДФO(shЁЁ)УӢЩYБП